



红外光学设计—— 球差理论与激光扩束镜
浏览量(263)
红外与可见光比相对简单,其设计有以下几个特点。
相对容易的是:
○ 可选择的材料比较少;(选择恐惧症的福音,不触及灵魂,上手容易)
○ 长波长,衍射极限高,像质相对要求不高;
○ 非球面和衍射面的广泛加持;
较难/较繁琐的是:
○ 杂散光分析与抑制;
○ 二次成像与冷阑匹配;
恰巧以前有个学生问我:“有了Zemax这种设计软件,像差理论有什么用?”。我相信这也是很多初学者的问题,初学者关注软件使用,而老鸟则一次次复习理论知识,尝试从像差理论中找寻更便捷高效的初始结构。
因此,红外系列的文章将尝试结合像差理论来写,这第一节就来说说球差理论应用的典型实例——激光扩束镜。
——————————正文分割线——————————
Keywords:
Spherical Aberration, Lens Bending,Spherical Aberration Correction, IR Lens design, Spherical Aberration, IR Laser Expander
初级球差理论
如下图定义的透镜光焦度可计算为:

式中,R1和R2有符号定义,以下图为例,R1为正,R2为负;N为材料折射率;t为透镜厚度。
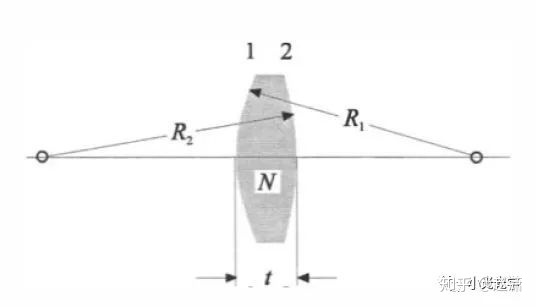
忽略透镜厚度t之后,可得到简化光焦度表示:

式中,c1和c2为R1和R2的倒数,即为其曲率,c为透镜曲率和。
由该式我们可以看到,当曲率和不变时焦距不变,但透镜形状可以变化,这就是单透镜校球差的理论基础——透镜弯曲。
此处我们定义透镜形状因子K=c1/c。
由基础像差理论,我们有球差弥散斑角直径(弥散斑直径B/焦距f=归一化弥散程度):

式中N为折射率,K为形状因子,f为焦距,f#为相对口径。
若要得到透镜弯曲的最佳形状,需对上式对K求导,以得到K的极值。然后可以得到如下一组R1、R2的解。

此即为透镜弯曲校球差的最佳形状公式。PS:基于薄透镜理论
扩束镜
扩束镜为倒置望远系统,两种最常用的折射式结构为Galilean伽利略式和Keplerian开普勒式,如下两图所示:
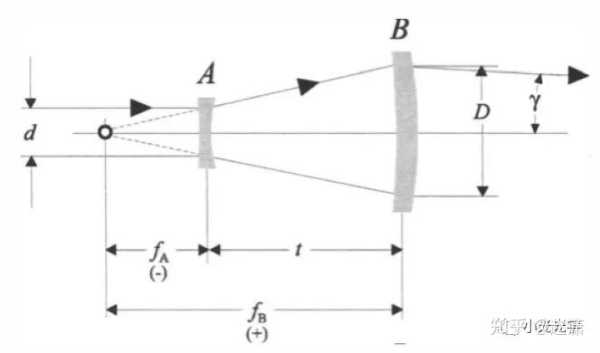
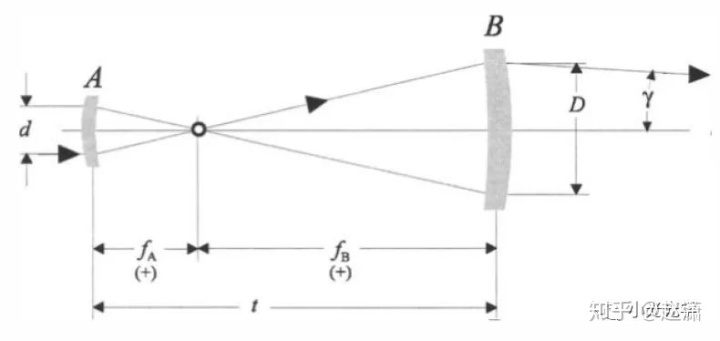
图中标注了焦距正负,由于球差的存在,实际光线并非完全准直。
如果每个单透镜都单独使用透镜弯曲以得到最小球差,则此时系统的剩余发散角可表示为:

式中,m为放大率m=D/d,同时由于正负像原因,伽利略m为正,开普勒m为负。f#为相对口径。
如在LWIR长波红外,使用Germanium锗透镜,N=4,f#=2,m=5,可计算得到伽利略式发散角=-1.7mrad,而开普勒式发散角=-2.6mrand。
很明显的能看到,同种材料,相同参数,伽利略式的发散角要小于开普勒式。这是因为伽利略式的第一片负透镜产生负球差补偿了第二片的残余正球差。
由此,我们下面将使用伽利略式结构,并尝试通过设计第一片负透镜弯曲来达到最佳消球差效果。
首先,假定正透镜使用初级球差理论中的最佳形状,对应曲率可表达为:

需注意,以上公式与球差理论中的区别是由于镜片reverse。
应用初级球差理论,使系统球差=0,可得到如下关于负透镜形状因子的二次方程:

假设两透镜使用同种材料,上式可简化为:

仍取Germanium锗材料,正透镜B焦距取50mm,可计算得到负透镜A的形状因子及各R值如下:

好了,现在我们由初级球差理论得到了要设计的扩束镜的初始结构,再次重复下设计参数,然后进入Zemax实现它。
设计参数:
设计波长:10.6um CO2 laser
扩束倍率:5X
材料:Germanium
结构形式:Galilean
参考焦距:-10mm X 50mm
F#:2
Zemax实现:
Procedures#1 without spherical aberration theory
首先看下没有像差理论时的操作流程,
设置波长,0视场,入瞳直径5mm。同时打开Afocal模式。
为演示暂且将透镜厚度设为1.2mm,然后按经验给第一片第1面和第二片第2面分配曲率,并设为变量,同时加空气间隙为变量;

然后添加优化操作数,控制两片透镜焦距,再添加Default Merit Function控制RMS角半径。(我加了REAY比值来监控实际放大率)

大功告成,点优化等完成后:

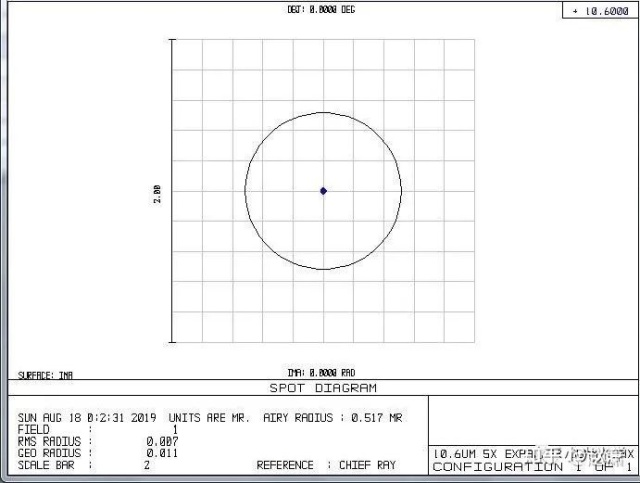
此时的Spot Diagram为:
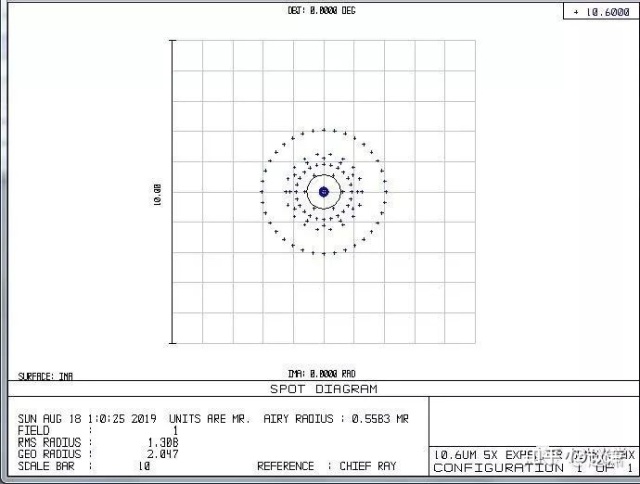
感觉不够,把所有曲率加上再优化一次,经过比较长时间的优化可以得到如下结果:

此时的Spot Diagram变为:
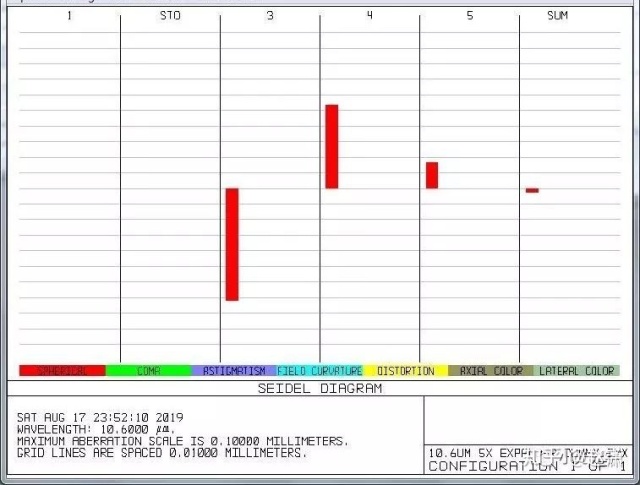
此时的系统性能满足衍射极限。Seidel Aberration Diagram如下:
Procedures#2 with spherical aberration theory
首先,重复下最上面的计算结果:
放进Zemax里,并设置RA2、RB2和空气间隙为变量:

由于加了厚度,导致焦距偏离,与Procedure #1使用相同的Merit Function。
点优化后,这次优化收敛速度会远快于Procedure #1,得到:

此时的Spot Diagram为:
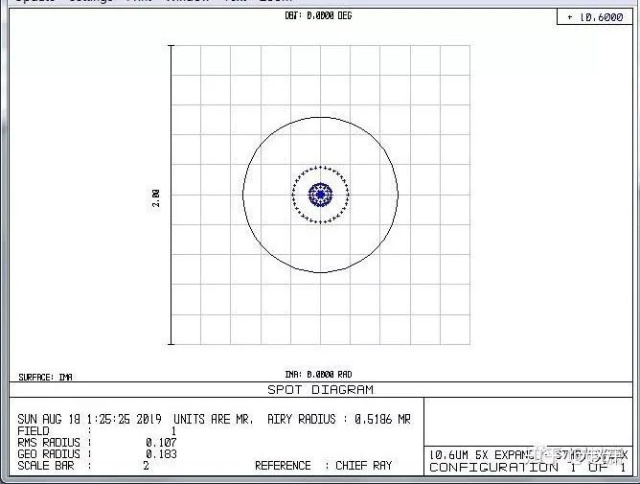
系统目前性能已满足衍射极限。同时由其优化速度上也能得知,良好的初始结构让优化算法更快速的找到局部极值。
当然,如果觉得不够,可以使用Hammer优化锤它一下,比较短的时间后,会得到第二个结构。

此时Spot Diagram如下图:
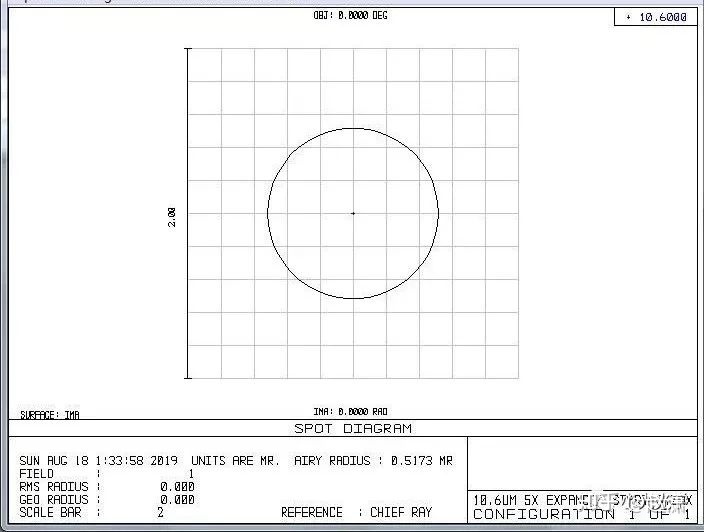
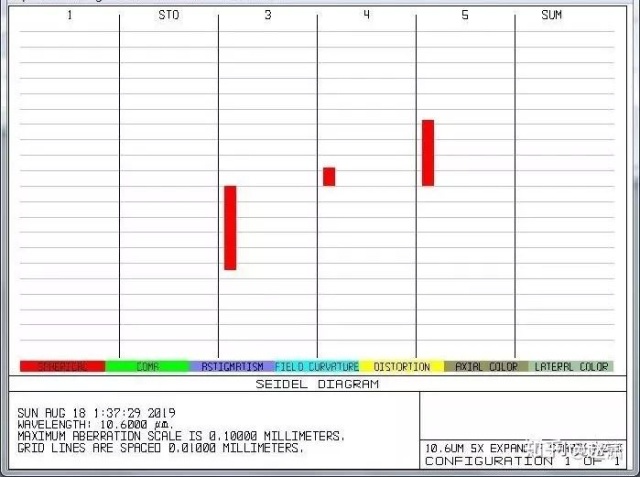
此时,球差可以说已经被完全校正。参考现在的Seidel Aberration Diagram如下:
总结:
本文从球差理论、透镜弯曲校球差最佳形状入手;根据激光扩束镜两种常用结构,推导了其球差理论与初级球差理论最优初始结构。而后,展示无理论指导与有理论指导两种设计方法的优化效率和效果。通过此文希望大家能了解到像差理论对设计的帮助。
软件只是个计算工具,而设计的好坏在于我们的聪明才智。
参考文献:
1. Max J. Riedl, Optical DesignFundamentals for Infrared System (Second Edition).
2. Warren J. Smith, Modern Optical Engineering- The Design of Optical Systems (Third Edition).
来源:本篇文章首发于公众号“小光光学”
分享至好友和朋友圈
免责声明:
网站内容来源于互联网、原创,由网络编辑负责审查,目的在于传递信息,提供专业服务,不代表本网站及新媒体平台赞同其观点和对其真实性负责。如因内容、版权问题存在异议的,请在 20个工作日内与我们取得联系,联系方式:021-80198330。网站及新媒体平台将加强监控与审核,一旦发现违反规定的内容,按国家法规处理,处理时间不超过24小时。



